Jack Naylor
PhD Candidate with the Australian Centre for Robotics, supervised by Don Dansereau. My work spans computational imaging, robotic vision and scene representation. From Aug 2025 to Feb 2026 I was a Fulbright Future Scholar visiting the Light Transport Lab at CMU's Computational Imaging Group and Robotics Institute , where I was supervised by Matthew O'Toole.

202B, Rose St Building J04
University of Sydney
Darlington, NSW, 2006
I am a PhD Candidate with the Australian Centre for Robotics at the University of Sydney developing radiance-based methods allowing robotic platforms to operate in visually complex and unstructured environments. I received my Bachelor of Engineering (Mechanical) Hons I and Bachelor of Science (Advanced) degrees from the University of Sydney in 2022, with majors in Space Engineering and Physics. In 2025, I received a Fulbright Future Scholarship to work with Carnegie Mellon University on multimodal radiance-based representations.
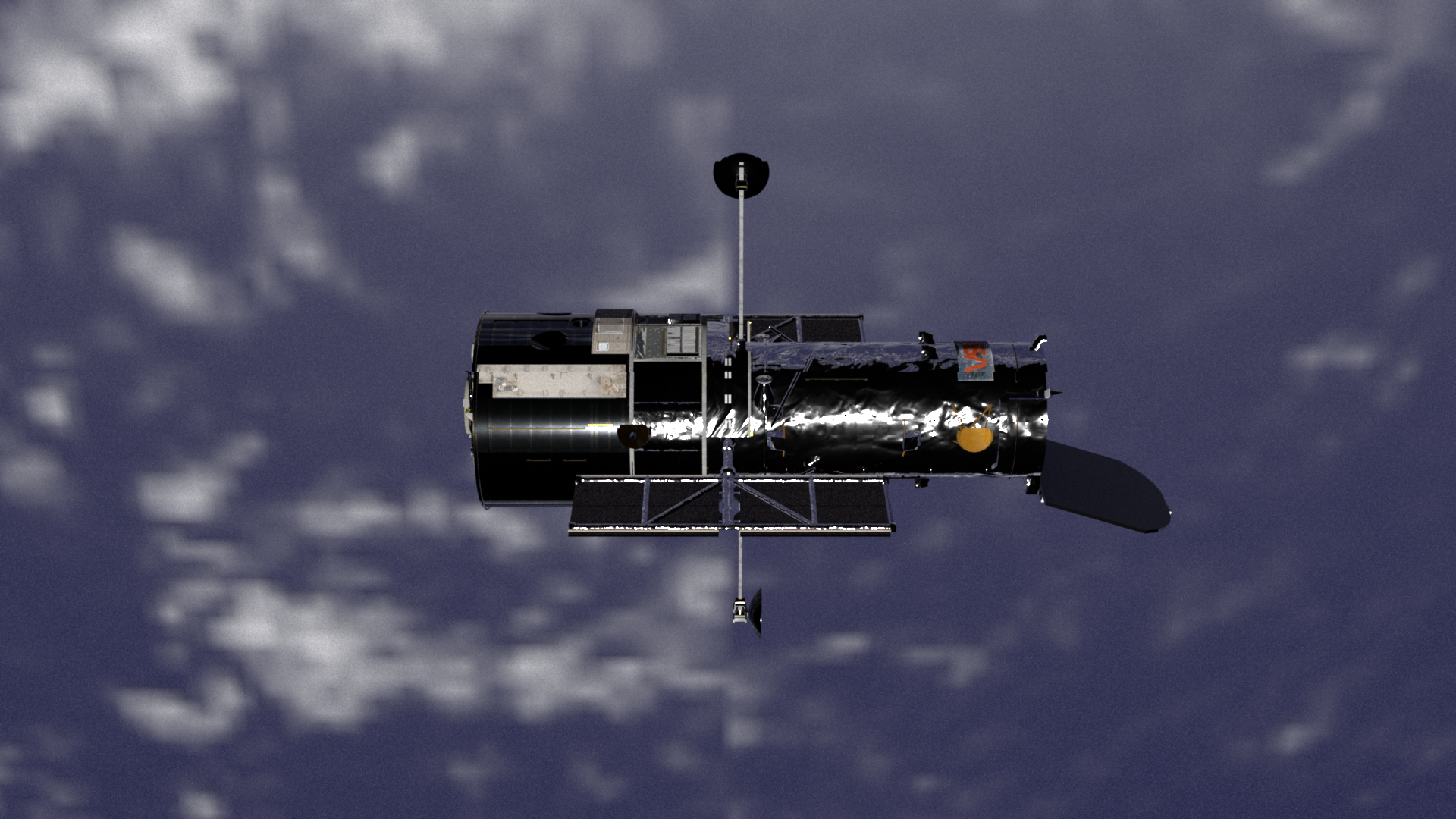
My research interests lie across computational imaging, robotic vision, and scene representation. I have a particular focus on developing new sensors, algorithms and representations to see in visually challenging environments, from marine, to air and space.
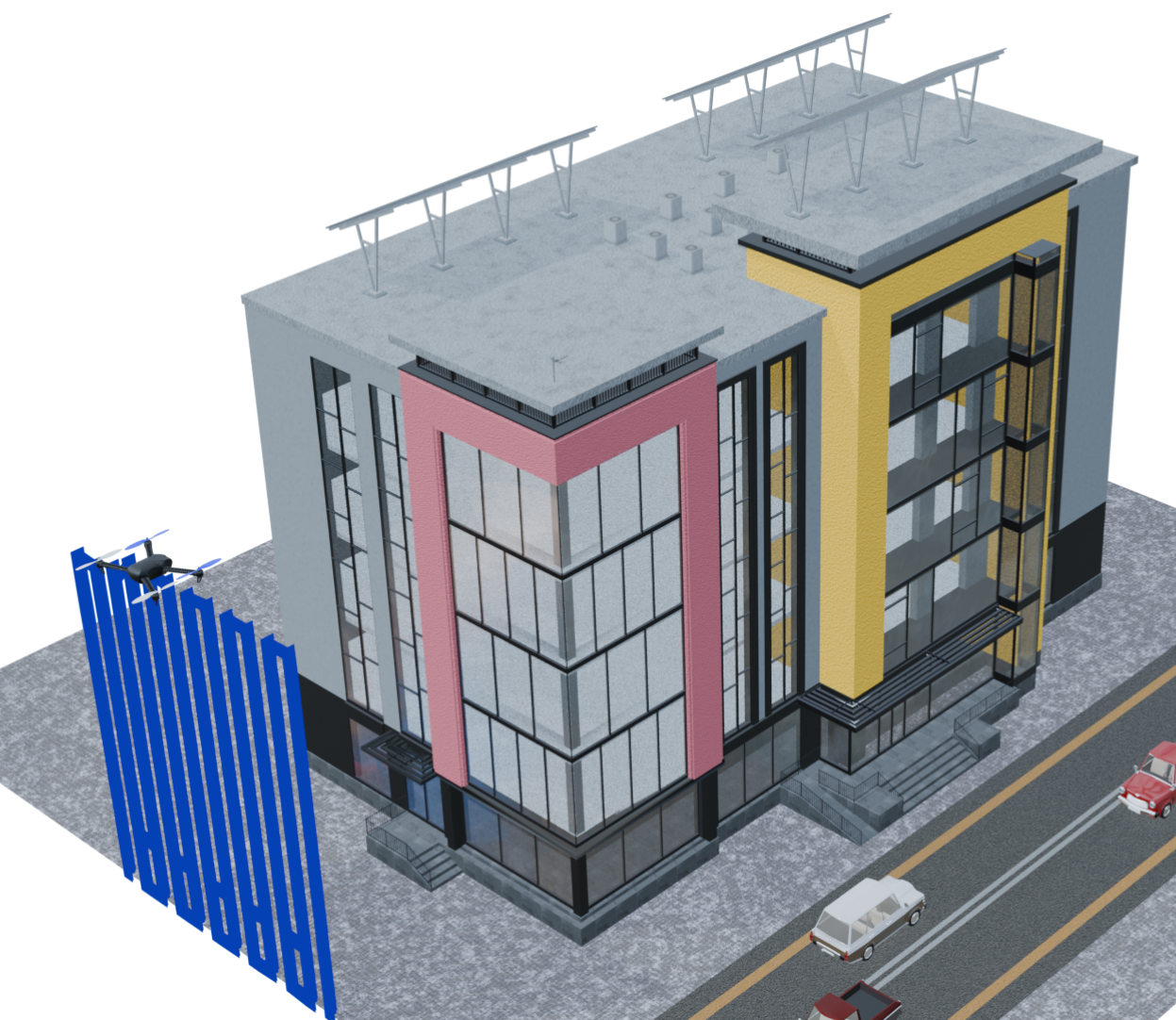
Prior to my PhD, I was a Computer Vision Research Student with Nearmap undertaking my Honours thesis on targeted small object extraction and reconstruction approaches for thin linear features in aerial imagery.
News
| Jul 1, 2026 | Happy to share I’ve received a University of Sydney Faculty of Engineering Career Advancement Award to support my work over the next six months while I am under examination. I’ll be working on new light field imaging processing techniques for non-Lambertian scenes. |
|---|---|
| May 31, 2026 | I’ll be at CVPR in Denver next week presenting Surf-NeRF at the Third Workshop for Learning 3D with Multi-View Supervision (3DMV) , and helping present our work on multi-frequency time-of-flight radiance fields at the Computational Cameras and Displays workshop! Please do reach out if you will be there and would like to catch up! |
| Apr 4, 2026 | Honoured to be presented with the 2026 Dean’s Award for Casual Academic Excellence! |
| Aug 1, 2025 | Now a visiting Fulbright Future Scholar at CMU working with Matthew O’Toole on multimodal radiance-based representations! I’m hoping also to spend some time visiting around the US so would love to connect! |
| Dec 12, 2024 | Pleased to announce I have been awared a Fulbright Future Scholarship (funded by the Kinghorn Foundation) to work with Prof. Matt O’Toole and the Computational Imaging Group at Carnegie Mellon University’s Robotics Institute in August 2025. |